How Voice Coil Motor Works in Speaker?
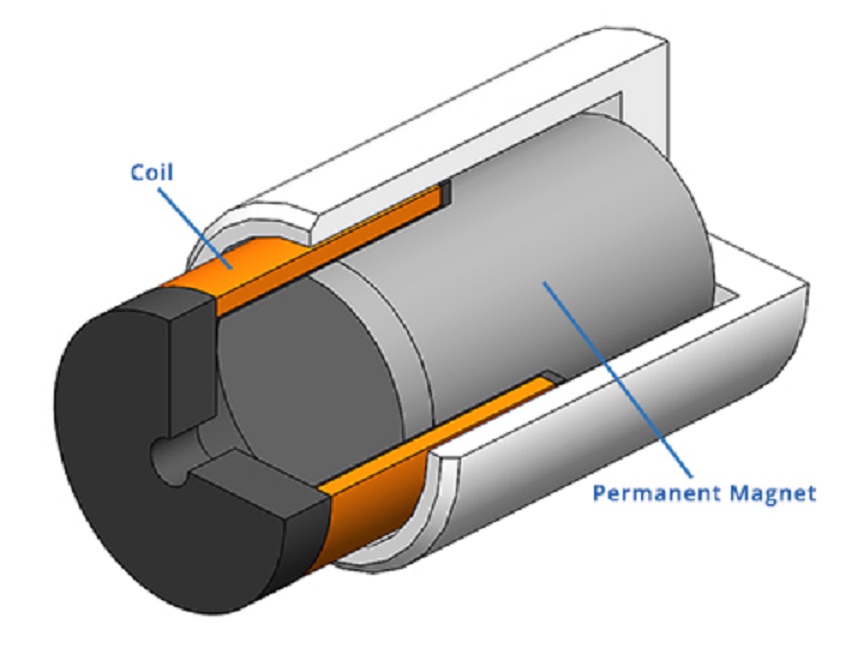
Loudspeakers were used to amplify or create a louder voice, thus the name “voice coil” stuck. Voice coil motor uses similar technology to speakers, but it is designed to produce higher forces over larger distances or "strokes". Voice coil motors do not have a commutator but use a position sensor. These motors consist of two separate parts: the magnetic housing and the coil.
Voice Coil Motor
Speaker Voice coils typically consist of:
- a non-magnetic center pole;
- a cylindrical coil connected to the power supply;
- and an outer cylindrical permanent magnet.
The current running through the coil creates a magnetic field, which interacts with the field established by the permanent magnet.
The speaker voice coil works because of the force between a static magnetic field and an electric current perpendicular to the field.
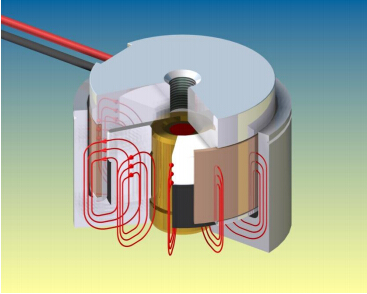
Voice Coil Motor
The operation principle of the speaker voice coil:
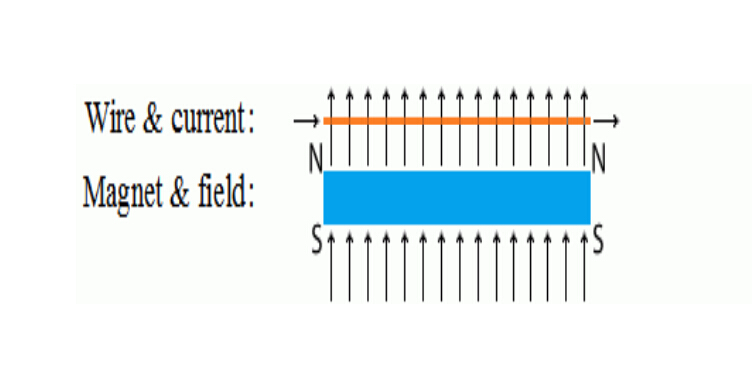
Below is a schematic diagram of a current-carrying wire and a magnet.
Arrows indicate the direction of the electric current (to the right) and of the magnetic field (up):
Voice Coil Motor Characteristics:
- Reliability – side forces developed are negligible, so bearing loading can be very low to enable long-life operation;
- Simplicity – the voice coil motor is a single pole device requiring no commutation. Both the device itself and the associated controller can be very simple and robust;
- Flexible Configuration – the principle of operation lends itself to many different mechanical layouts allowing great flexibility in the design of associated systems;
- Fast Operation – low electrical inductance and low moving mass enable a fast inflow of current and high acceleration. Acceleration of >500G is possible with custom devices;
- Controllability – force is proportional to the applied current, and is uniform through a displacement that can be several 10’s of mm or several 10’s of degrees rotation;
- Low Hysteresis – the magnetic behavior is free of hysteresis over typical operating areas, depending on the type of bearings used, very low hysteresis can be realized;
- Flexible Production – most product configurations can be produced without requiring tooling for prototypes, or for limited production volumes – product design needs to allow for manufacturing methods appropriate to customer volume requirements.
Speaker Voice Coil Components
For wear resistance and good surface finish along with required magnetic properties, the shaft material is either stainless steel (hardenable stainless steel may be slightly magnetic and have a slight influence on the force characteristic, nonmagnetic stainless steel is softer and more susceptible to damage) or titanium. The magnet assembly of VM series is designed for good volumetric efficiency and useful linear stroke, these characteristics may be at the expense of some loss of linearity. High energy density magnets drive the material of the voice coil pot (housing) close to magnetic saturation to develop the strongest possible magnetic field.
Stanford Magnets offers custom magnets assemblies to ensure accurate guidance of the coil assembly within the magnet assembly, and to facilitate easy installation in customer applications. Custom designs can demonstrate better linearity at the expense of increased size/weight & cost.
Coils of the VCM series are normally designed to use the full depth of the pot assembly. This results in maximum mechanical work output capability but may result in a force characteristic that is not ideally suited to a given application. The portion of the coil that lies outside the airgap field dissipates power (as heat) but develops no useful force.
The linear range of a voice coil (the range within which developed force is >90% of peak force) will normally be roughly equal to the difference between the coil length, and the length of the pole.
For maximum force, the coil length and pole length should be approximately equal in length, but the linear range with this configuration will be small.
For best linearity, one of the coil and polepiece should be longer than the other by the linear range required. It is usually more cost-effective to make the coil longer than the magnet assembly – making the coil shorter than the polepiece results in lower moving mass and faster dynamic response, but this may require a more massive and expensive magnet assembly to produce a required force characteristic.
Conclusion
Thank you for reading our article and we hope it can help you know how a voice coil motor works in a speaker well. If you want to know more about magnet products, we advise you to visit Stanford Magents for more information.
Stanford Magnets is one of the top magnet product suppliers across the world and has rich experience in the manufacture and sale of all kinds of magnet products. We can provide customers with high-quality rare earth permanent magnetic products such as neodymium magnets, and other non-rare earth permanent magnets at a very competitive price.